

自動車技術会
自動車技術会(東京都千代田区、坂本秀行会長)は3月2日より、第2回自動運転AIチャレンジ 制御部門の参加者募集を開始した。本競技は予選として行うもので、シミュレーション結果の上位8チーム(予定)が6月の本大会に進出する。
参加者は、オフィシャルサイト上にて募集を開始する。サイトでは競技シナリオの確認、チームエントリー (上限3名)が可能。6日には、オフィシャルサイト上にてローカルシミュレータの配信を開始、4月6日に オンラインシミュレータ用のアカウントを発行・通知。 オンラインシミュレータの稼働を開始し、コードの受付を開始する。(ランキングは随時更新)
4月17日にオンラインシミュレータをクローズ・採点を締切り、4月下旬にランキングを確定し、上位8チーム(予定)が6月の本大会に参加する。
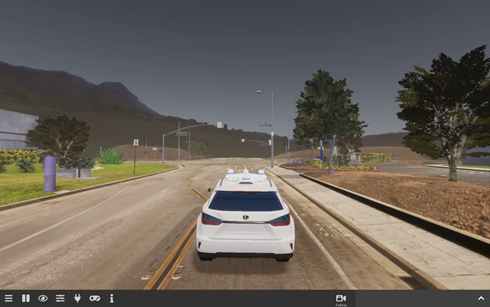
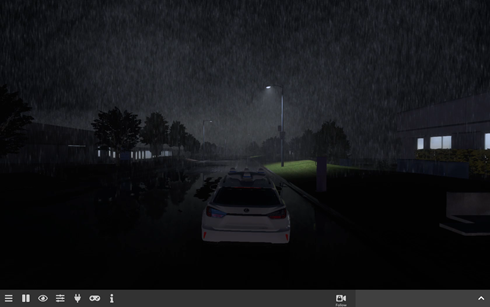
シミュレーションは、Autowareで利用可能なオープンソースシミュレータ(LGSVL)をベースに「アクセル制御」、「路駐車両の回避」、「信号機認識、発進」の3シナリオを実施する。
参加者は、ローカル環境で生成したコードについて、まずはローカルでシミュレーションを実施し、検証して改善を繰り返す。オンラインシミュレータ稼働開始後に、完成したコードをアップロードし、オンライン上のシミュレータの評価を受け、各シナリオで加点・減点・失格の判定を受け、採点結果を合計した点数によってランキングが決定される。
<<自動運転AIチャレンジ オフィシャルサイト>>
https://www.jsae.or.jp/jaaic/
(4月10日追記)
新型コロナウイルスの感染拡大・影響長期化の状況を鑑み、2020年6月14日(日)に予定していた「第2回自動運転AIチャレンジ決勝」の中止を決定した。
参加者は、オフィシャルサイト上にて募集を開始する。サイトでは競技シナリオの確認、チームエントリー (上限3名)が可能。6日には、オフィシャルサイト上にてローカルシミュレータの配信を開始、4月6日に オンラインシミュレータ用のアカウントを発行・通知。 オンラインシミュレータの稼働を開始し、コードの受付を開始する。(ランキングは随時更新)
4月17日にオンラインシミュレータをクローズ・採点を締切り、4月下旬にランキングを確定し、上位8チーム(予定)が6月の本大会に参加する。
シミュレーションは、Autowareで利用可能なオープンソースシミュレータ(LGSVL)をベースに「アクセル制御」、「路駐車両の回避」、「信号機認識、発進」の3シナリオを実施する。
参加者は、ローカル環境で生成したコードについて、まずはローカルでシミュレーションを実施し、検証して改善を繰り返す。オンラインシミュレータ稼働開始後に、完成したコードをアップロードし、オンライン上のシミュレータの評価を受け、各シナリオで加点・減点・失格の判定を受け、採点結果を合計した点数によってランキングが決定される。
<<自動運転AIチャレンジ オフィシャルサイト>>
https://www.jsae.or.jp/jaaic/
(4月10日追記)
新型コロナウイルスの感染拡大・影響長期化の状況を鑑み、2020年6月14日(日)に予定していた「第2回自動運転AIチャレンジ決勝」の中止を決定した。
